Overworked Teachers are a Problem
For years, we’ve been facing a concerning shortage of teachers. Overworked educators struggle to maintain the quality of education, leaving students without the individualized attention they need. A robot that supports both teachers and students on a weekly—or even daily—basis could make a significant difference.
For years, we’ve been facing a concerning shortage of teachers. Overworked educators struggle to maintain the quality of education, leaving students without the individualized attention they need. A robot that supports both teachers and students on a weekly—or even daily—basis could make a significant difference.
A Robot Assistant
The goal of my thesis was to design a robot aimed at supporting classrooms and advancing the digitalization of the German school system. With my growing interest in AI, I sought to create a product that seamlessly combined technology and design. Beyond delivering the final product-concept, I also aimed to deepen my understanding of ux design and its many facets.
The goal of my thesis was to design a robot aimed at supporting classrooms and advancing the digitalization of the German school system. With my growing interest in AI, I sought to create a product that seamlessly combined technology and design. Beyond delivering the final product-concept, I also aimed to deepen my understanding of ux design and its many facets.
Design Method
At the beginning of my thesis, I prioritized identifying a design process model to guide the project, as it offered the perfect opportunity to work on a start-to-finish concept. I decided to base my work on the Double Diamond model.
At the beginning of my thesis, I prioritized identifying a design process model to guide the project, as it offered the perfect opportunity to work on a start-to-finish concept. I decided to base my work on the Double Diamond model.
My research focused on understanding the UX process and the roles of practices like interface and interaction design within it. This was essential for designing and mapping out user interactions, defining the robots functionality, and developing its visual design, including form, color, and materials.
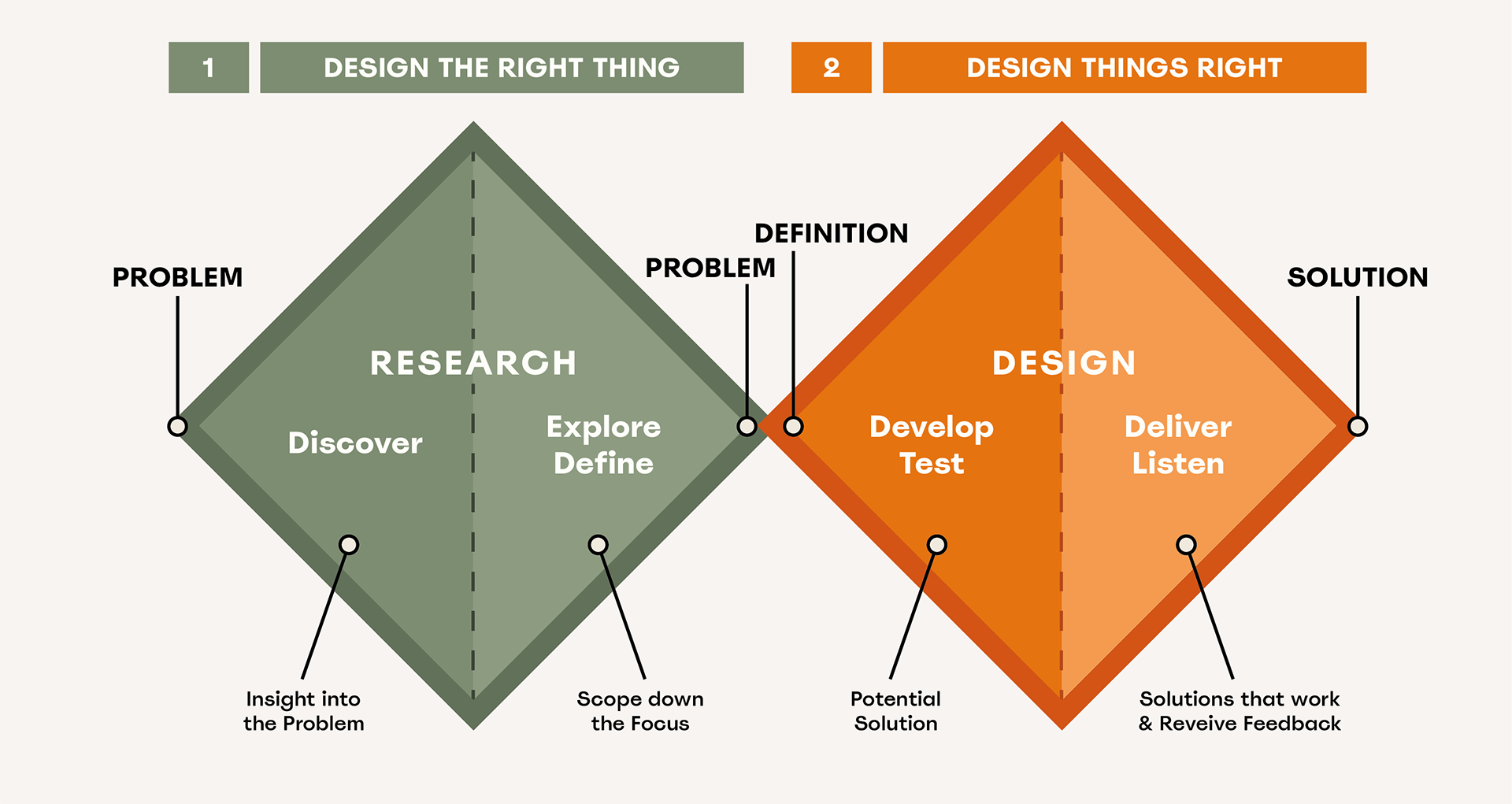
Double Diamond Model
The German School System
Additionally, I conducted an in-depth analysis of the German school system, specifically focusing on English classes, teachers, and students. Through interviews with teachers and qualitative observation of several English lessons, I gathered insights into their needs and challenges. These findings inspired functions for the robot, which I tailored to support vocabulary, speech, and grammar exercises.
Additionally, I conducted an in-depth analysis of the German school system, specifically focusing on English classes, teachers, and students. Through interviews with teachers and qualitative observation of several English lessons, I gathered insights into their needs and challenges. These findings inspired functions for the robot, which I tailored to support vocabulary, speech, and grammar exercises.
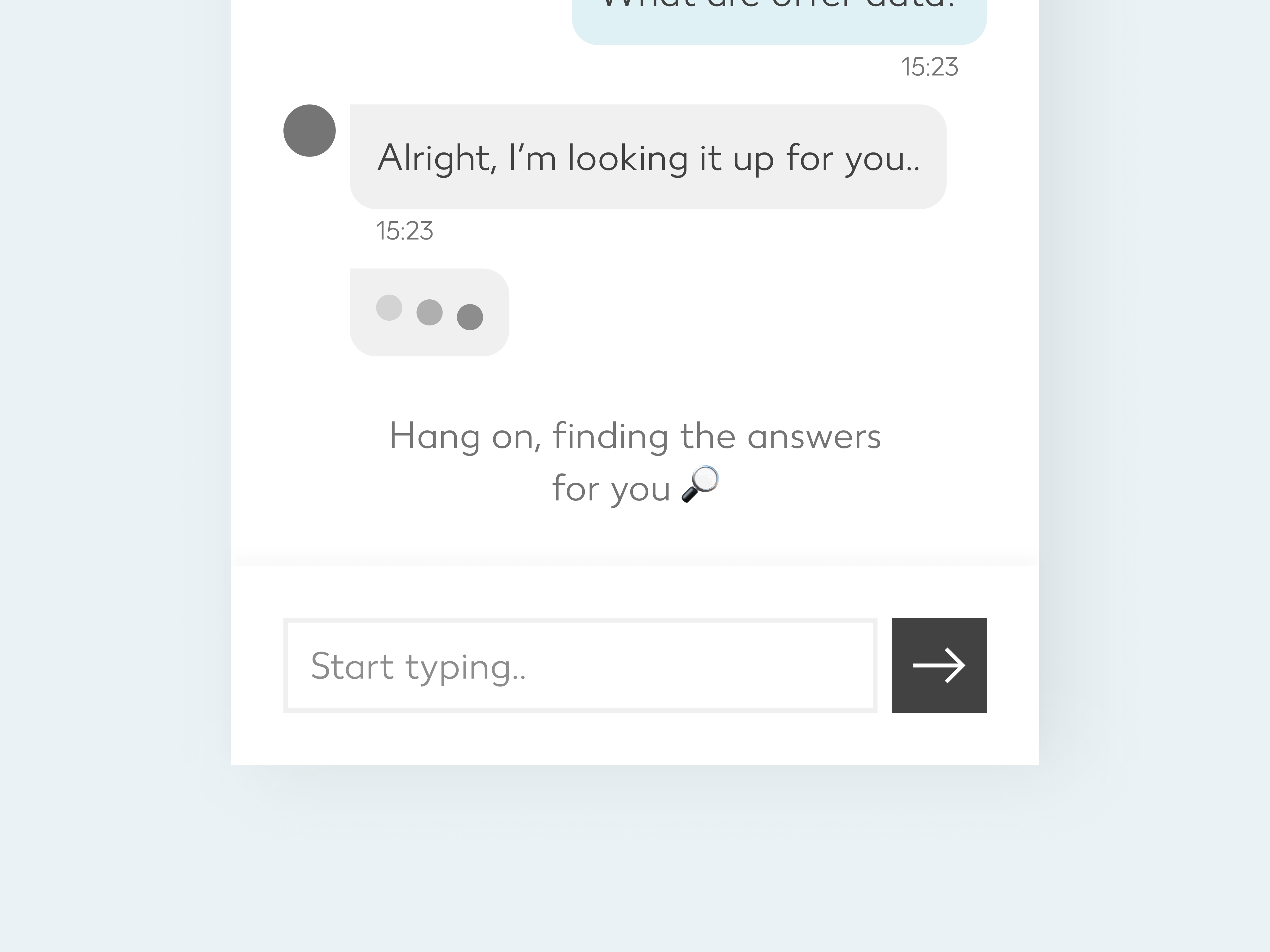
To design the user journey and determine the robot’s physical characteristics, I mapped out multiple interactions between the robot and its users, ensuring practical and intuitive engagement.
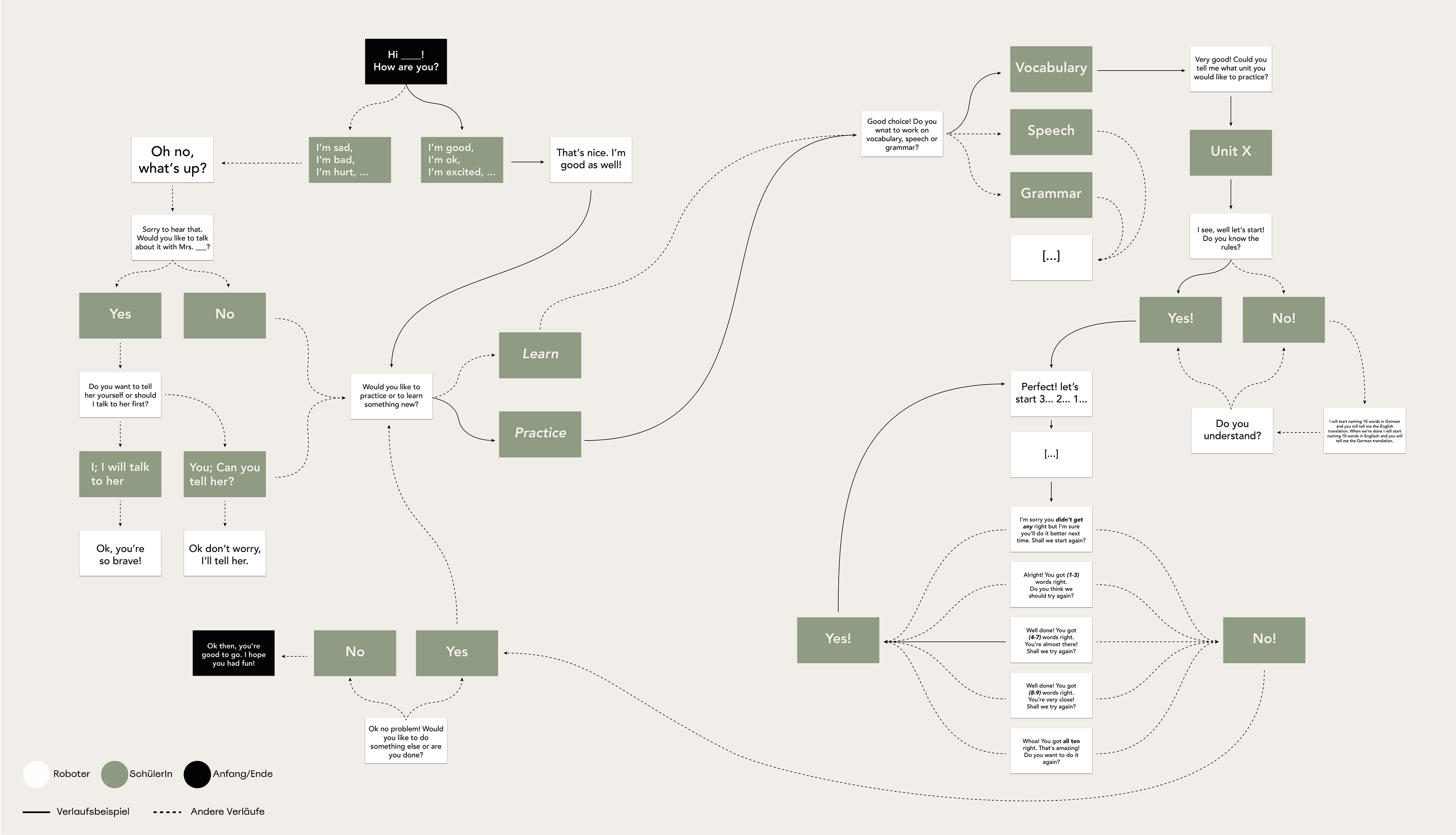
User Journey / Dialog Interaction
Building the Robot
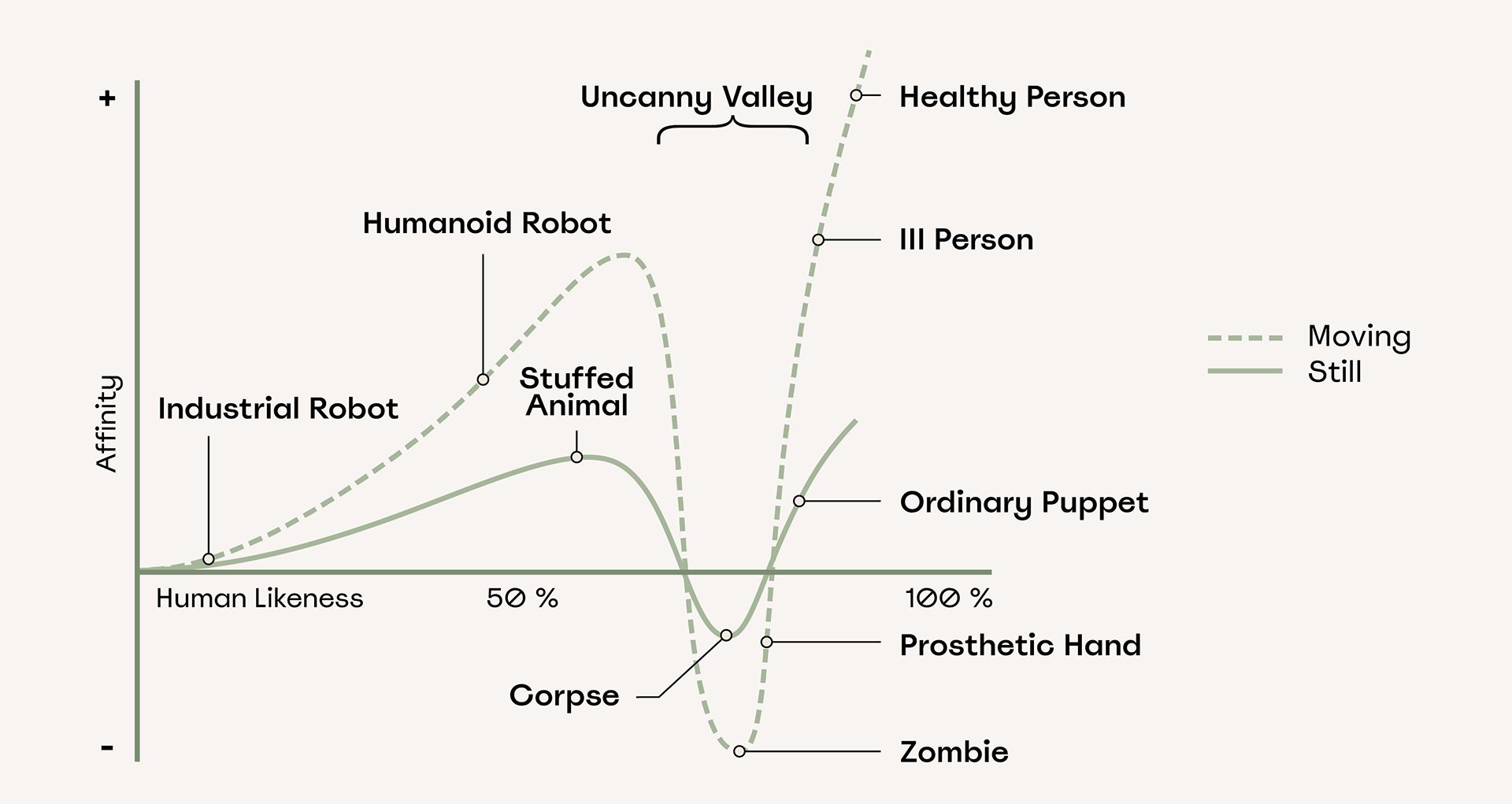
Before starting the design process, I outlined specific aspects I wanted to avoid. For instance, I aimed to ensure the robot would not be intimidating to students. It needed to be more "cute" than mechanical or unsettling, steering clear of the uncanny valley. Trustworthiness was another key attribute, as the robot would interact with diverse students, including those with speech or reading impediments, anxiety, or disabilities. Additionally, I considered its potential as a tool for refugee students requiring intensive one-on-one support.
Before starting the design process, I outlined specific aspects I wanted to avoid. For instance, I aimed to ensure the robot would not be intimidating to students. It needed to be more "cute" than mechanical or unsettling, steering clear of the uncanny valley. Trustworthiness was another key attribute, as the robot would interact with diverse students, including those with speech or reading impediments, anxiety, or disabilities. Additionally, I considered its potential as a tool for refugee students requiring intensive one-on-one support.
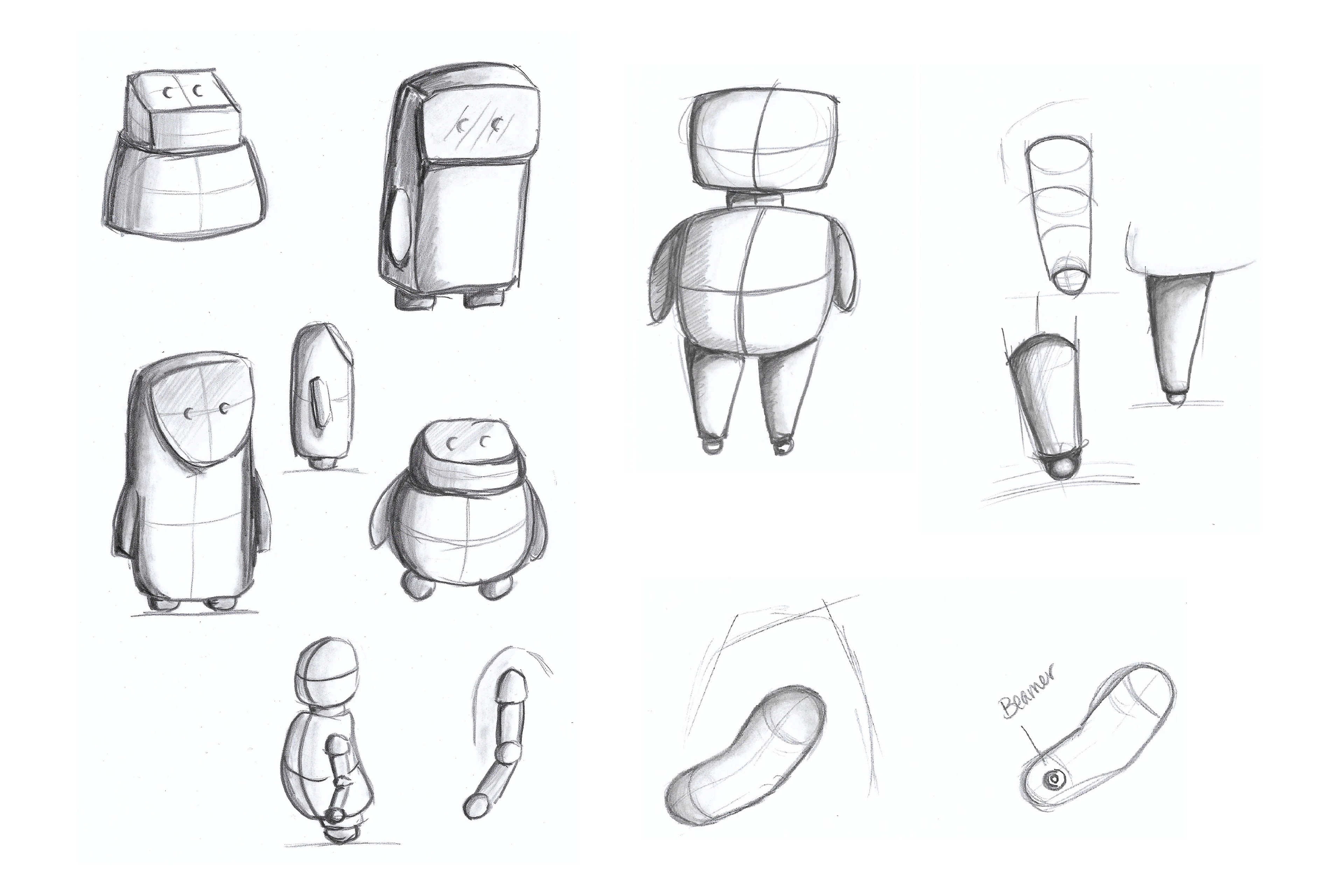
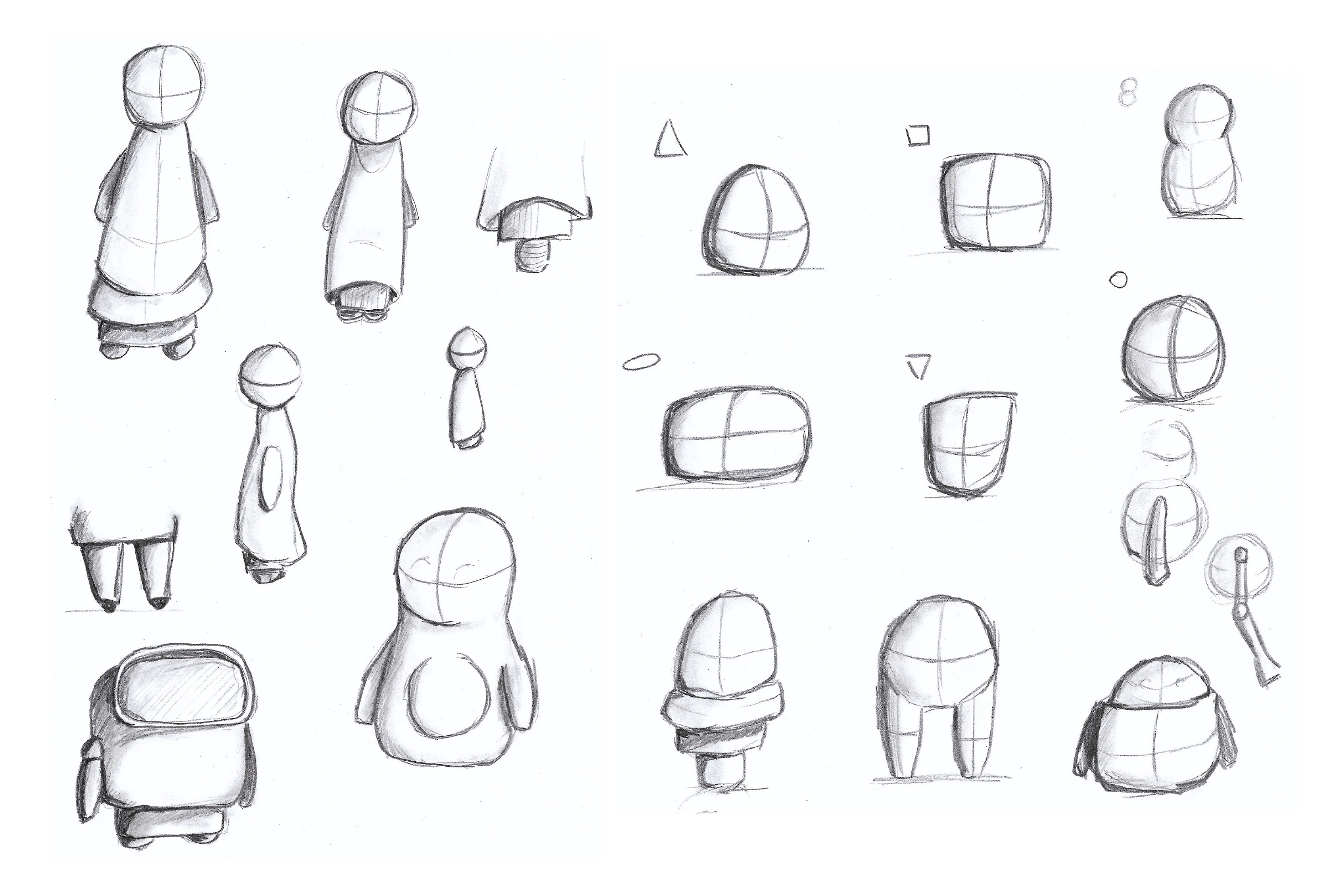
With these principles in mind, I began brainstorming and sketching various robot designs. The most promising concepts were developed further in the 3D program Blender. Seeing the designs in 3D clarified which direction to take for the final version.
The chosen design can be described as fluffy, cute, chubby, and friendly. It is proportioned perfectly to navigate a classroom while fostering a sense of safety and approachability.
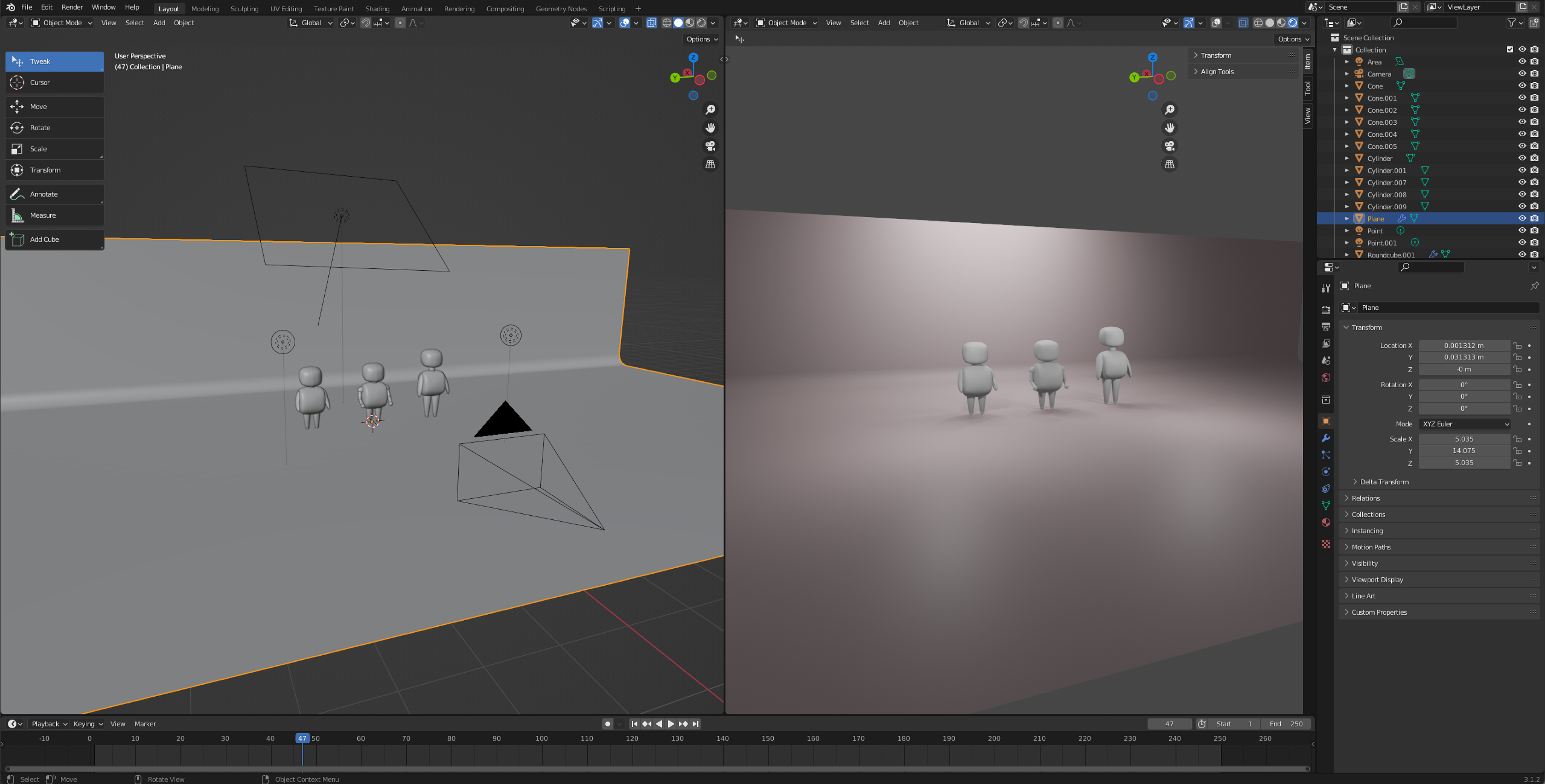
Three different Body-types in the 3D-Program Blender
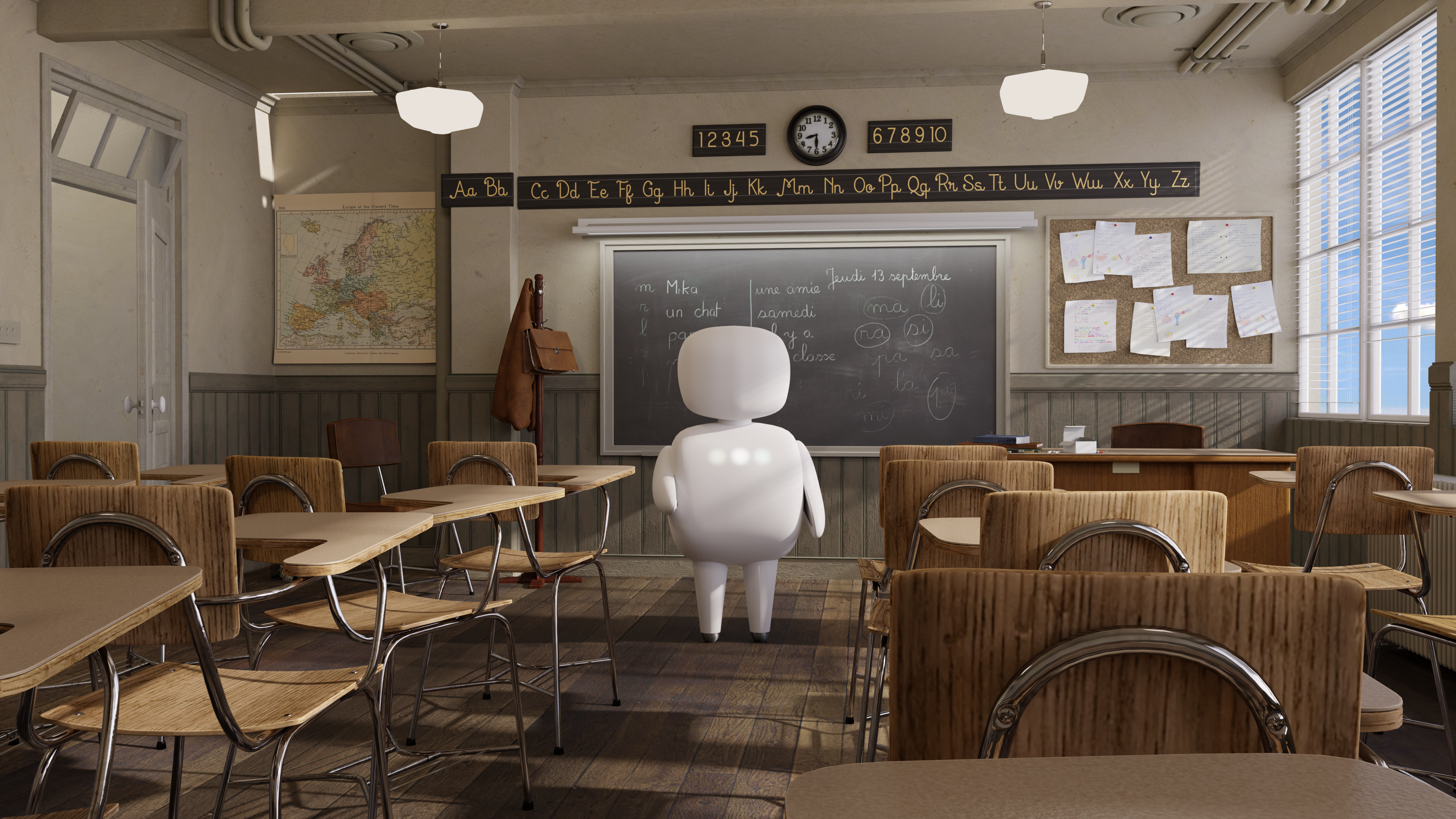
Final rendering with additional light-up Interface
You can find and read my thesis here! (only available in german)